 Portuguese
Portuguese  English
English  Spanish
Spanish 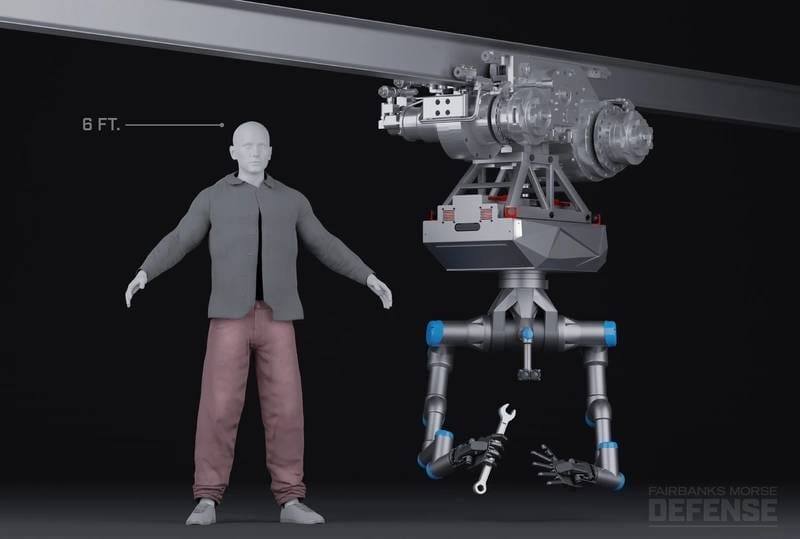
Autonomous Ships Raise The Issue Of Emergency And Routine Maintenance. Challenges Include AI, Robotics, And Secure Communications.
The technological advancements in robotics are revolutionizing various sectors of the industry, and the maritime market is no exception. The automation of processes and the implementation of robots in autonomous ships are transforming the way operations are carried out, bringing greater efficiency and safety to the sector. FMD is one of the companies that has invested in research and development of robotics for the engine room, aiming to improve maintenance and repair practices for autonomous ships.
The Future Of Robotics In The Maritime Environment
The team at FMD led by Trey Taylor is relatively new, starting in 2019 with a basic product that analyzed monitoring equipment, ‘being able to provide this information to our technical teams for diagnosis and also providing some data to the end customer for self-assessment’. support.’ But that was just the beginning, and in 2020, Taylor’s team asked for more from the executive team. The result was ‘a roadmap for five product verticals we were interested in: AI, Autonomy, Robotics, Mixed Reality Capability, And Secure Communications.’
In developing robotic solutions for routine and emergency work and repairs in the engine room, Taylor credits his boss, FMD CEO George Whittier, for instilling his principle: ‘Don’t aim for the target, aim where the target will be’.
-
Petrobras evaluates suspension of sales to distributors and considers canceling the cooking gas auction following guidelines from the Federal Government.

-
Lula reveals a masterstroke by Petrobras to undo a deal made by Bolsonaro, which involves the return of an important refinery that currently produces less than half of what was expected and makes Brazil dependent on international diesel.

-
A study confirms that the natural gas sector will reduce greenhouse gas emissions in Brazil by 0.5% and accelerate the energy transition by 2026.

-
Petrobras implements a severe adjustment and confirms a 55% increase in the price of aviation kerosene with a proposal for installment payments for the companies.

So, Taylor and his team of 22 people began to take a closer look at one of their key customers – the U.S. Navy. ‘We know that the Navy has a need, a desire to refuel unmanned resources at some point towards the end of this decade, and the timeline they want these resources deployed without intervention is now just 30 to 60 days’, said Taylor. ‘But the long-term goal is 180 days, so our team started looking for systems to help the Navy achieve this goal. We quickly came to the conclusion that we would need to do Maintenance, but how do we do maintenance when there is no human on board?’ Enter the robot.
 ‘You will need different resources at different times’, said Taylor. ‘For example, if I am doing something on an engine, I may need to be able to lift and support 150-200 pounds; but I may also need very precise manipulation of small accessories to remove that part. So I probably won’t have a bipedal robot with two arms. I will have a robot that can lean on a rail or bulkhead for that heavy lifting, and it can have four arms, two gross movement arms that can handle the heavy lifting and then two skilled arms that are doing the perfect fastening movements.
‘You will need different resources at different times’, said Taylor. ‘For example, if I am doing something on an engine, I may need to be able to lift and support 150-200 pounds; but I may also need very precise manipulation of small accessories to remove that part. So I probably won’t have a bipedal robot with two arms. I will have a robot that can lean on a rail or bulkhead for that heavy lifting, and it can have four arms, two gross movement arms that can handle the heavy lifting and then two skilled arms that are doing the perfect fastening movements.
Image courtesy of FMD
Views Of Maritime Robotics
Today, FMD’s work does not focus on a single solution, but on a series of different manifestations of how engine room robotics will look and function. ‘We decided that a robotic platform would likely be the right approach, but we want to make sure we understand the problems and understand the actual product requirements that a robot would have to facilitate’, said Taylor, a process that meant understanding the Navy’s long-term roadmap. As is common in the maritime space, there is rarely, if ever, a ‘one-size-fits-all’ technical solution, based on the wide variety of ship designs. ‘There are many significant challenges in working in a marine environment’, said Taylor. ‘I have bulkheads that I need to get through; I have confined spaces and open spaces. In some cases, I may want a robotic platform mounted on a bulkhead; in some cases, I will transit along rails; in some cases, I will be asked to traverse the space with a tracked or wheeled design. So when we look at the robotic platform, today we are really focused on modularity and those subcomponents.’
Beyond mechanics, the operational environment is taken into account. ‘How do I service when I am in a nearly two-meter-high channel on a vessel that is moving at 20 knots?’, Taylor asks. ‘A human is very good at figuring out their own stabilization, three points of contact, one hand holding a tool. A robot must be able to do the same thing.’ When reducing it to its essence, Taylor said it would be imagined as Legos.
Toward Autonomy Of Maritime Robotics
‘There are essential components that every robot will need: some basic autonomy, some basic AI, the way you train it to move, the way you control it remotely, vision systems, etc., which are common items on the platform. But then, when I think about all the equipment I’m going to swap or interact with, I may need 15, 20 tools of different sizes. I will need different lifting capabilities; and all this requires our platform to be able to adapt to it; automatically swap parts to go to a specific workstation or different configurations on that robot. But I want a common control methodology; I want a common charging methodology; I want a common autonomy methodology.’
Ultimately, it all comes down to the guiding principle that surrounds any complex technology: keeping it simple, which is much easier said than done.
The Role Of Robotics In The Engine Room
‘You will need different resources at different times’, said Taylor. ‘For example, if I am doing something on an engine, I may need to be able to lift and support 150-200 pounds; but I may also need very precise manipulation of small accessories to remove that part. So I probably won’t have a bipedal robot with two arms. I will have a robot that can lean on a rail or bulkhead for that heavy lifting, and it can have four arms, two gross movement arms that can handle the heavy lifting and then two skilled arms that are doing the perfect fastening movements.
Ultimately, if successful with widespread adoption, the use of robotics in the engine room could change the actual design of the engine itself. Initially, robotics must be designed to drive its business as if it were a human, so at a minimum, FMD is designing [robotics] to be equivalent to a human in strength and range of motion.
Challenges In The Development And Implementation Of Maritime Robotics
But as autonomy gains strength, there will be a gap. ‘There will be a small gap between the time when these unmanned vessels start launching and before there are enough of them in the fleet for capital equipment suppliers to redesign their systems for robotic support’, Taylor said. ‘So we have to bridge a gap where we have human-equivalent performance in many cases, for tool manipulation, for reach, for degrees of freedom of movement, the kinematics of actually moving pieces in and out of a piece of equipment, for example: we are taking this into account in our designs today.’
‘Today, we are in what we call generation 0.2, where we have a prototype that moves. We have control capabilities with limited detection on board, but there is a lot of data-based research that we need to do to influence the next generation. At this moment we are going through a scientific assessment of the basic and primary maintenance procedures of an engine, where we are mapping: What is the amount of connections? What are the sizes? What volume do I have to perform the services like a human? How much torque do I need on any individual connection in these maintenance procedures? We are doing this documentation right now, as we speak, on our engines, which will likely take us throughout the year [2023]’, with plans to have a basic platform by 2025.
As published in December 2023 Edition Of Maritime Reporter & Engineering News. Watch The Full Interview With Trey Taylor On Maritime Reporter TV:
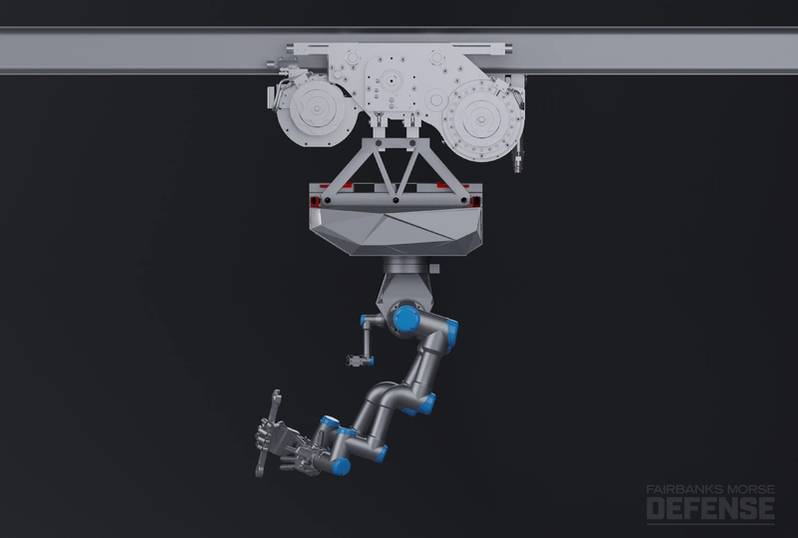 Image Courtesy FMD
Image Courtesy FMD
Technology Robotics Maritime






Seja o primeiro a reagir!