 Portuguese
Portuguese  English
English  Spanish
Spanish 
When Installing on a 26-Inch Electric Bike a Drone Motor Designed to Spin Close to 30 Thousand RPM, the Experiment Put Lightness, Radical Mechanical Reduction, Overheating, and Direct Comparison with a Traditional Motor Side by Side to Discover What Really Moves the Wheel Efficiently.
The electric bike used in the experiment seemed like the perfect stage for a simple yet uncomfortable technical provocation. On one side, a drone motor weighing only 40 grams, rated at about 1,000 watts. On the other, a conventional electric bike motor weighing 6 kilograms, with power in the same range. The question was inevitable: if both promise similar numbers, why does one of them seem absurdly too small to do the same job?
The attempt to answer this moved out of the technical specifications and into practice. The project didn’t just want to connect a lightweight motor to the wheel and see what would happen. It wanted to test how far the differences in rotation, torque, reduction, and thermal resistance changed what the word power really means in a real-world electric bike. This is where the numbers started to lose their glamour.
Power Equal on Paper Does Not Mean Force Equal on the Wheel

The starting point of the experiment is the most seductive and also the most misleading. Both the drone motor and the traditional motor were presented as units of approximately 1 kW.
-
In Mexico, a 3,000-year-old Maya site with the dimensions of an entire city may have been built as a colossal map of the cosmos, created to represent the order of the universe and reveal how this people organized space, time, and rituals.

-
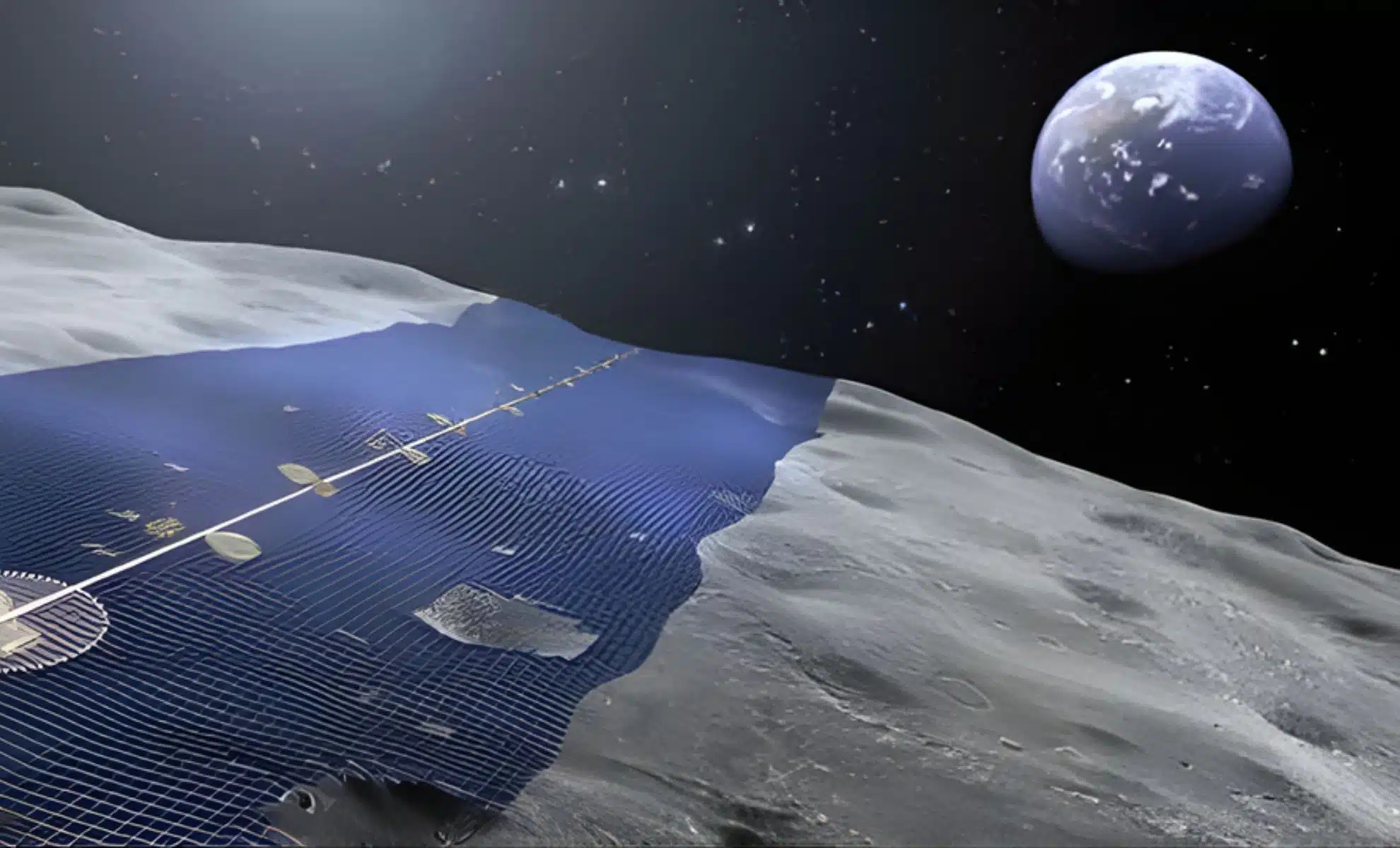
Japan wants to build a solar ring of 10,900 kilometers on the Moon to continuously send energy to Earth.
-
Weighing almost 1 ton, with temperatures of up to 3,000°C, the ability to launch 10,000 fragments within a radius of 1 km, capable of penetrating concrete and melting steel, Turkey’s terrifying bomb emerges as one of the most destructive non-nuclear weapons ever presented.

-
After a submarine disappeared beneath the “Doomsday Glacier,” scientists announce a new monstrous machine capable of operating at 3,000 meters depth to return to the heart of the ice and investigate a threat that could raise sea levels worldwide.

The drone had a specification of 928 watts, while the bike motor likely rounded to the nearest kilowatt. In theory, this would place both in the same nominal power category.
However, power alone does not explain mechanical behavior. The comparison used in the experiment itself helps to dismantle this illusion: a tractor may have power similar to that of a Nissan GT-R, but that does not mean it will reach the same speed or provide the same type of acceleration.
In the electric bike, the central difference is not just how many watts appear on the label, but how that motor transforms rotation into useful movement at the wheel.
The test bike had a 26-inch wheel and an estimated top speed of 28 miles per hour, which corresponds to about 360 rpm at the wheel. The drone motor, on the other hand, could rotate close to 30,000 rpm.
The distance between the two is the heart of the problem. An extremely lightweight motor can spin very fast, but that is far from meaning it will be able to push an electric bike with the authority of a system designed from the beginning for that purpose.
This is precisely where the concept of torque begins to crush the allure of the raw number.
A high-revving motor may even suggest impressive power, but if that energy does not convert into useful force after reduction, the whole system becomes an exercise in sophisticated improvisation. And that was exactly what the project aimed to test to the limit.
The Drone Motor Needed an Almost Absurd Engineering to Work

If the electric bike wheel needs to spin close to 360 rpm and the drone motor reaches nearly 30,000 rpm, the reduction calculation becomes a brutal requirement.
The system would need something close to 80 to 1 to turn the extreme rotation of the motor into something usable at the wheel.
A simple solution using chain and rear sprocket would generate a gigantic gear, something in the range of 4 meters in diameter, obviously impractical.
The solution was to resort to a combination of belts, pulleys, and chain. The project used a 4 to 1 reduction directly on the motor and another 4 to 1 on the output shaft, before connecting everything to the rear transmission. This allowed for a final wheel spin close to the desired 360 rpm.
The electric bike could only operate with that tiny motor if it was preceded by a mechanical architecture entirely designed to tame its rotation.
This stage was not ancillary. It became a central part of the test. The pulleys were designed in CAD, cut from aluminum, and mounted on a plate attached to the frame with 3D-printed brackets.
The system included precision axle screws, bearings, chain tension adjustments, and a guide pulley. In other words, the extreme lightness of the motor did not simplify the electric bike.
In practice, it required more parts and more adaptation.
It was also necessary to install the electronic components for powering the motor and an Arduino board responsible for converting the analog throttle signal into a digital signal understandable by the drone motor controller.
When the motor is too small for the function, the electric bike stops being just a vehicle and becomes a mechanical and electronic lab at the same time.
The First Motor Delivered Movement, Noise, and Smell of Failure

The first test in motion was not entirely useless, but it made clear the fragility of the setup.
There was noticeable power at the wheel, there was throttle response, and there was the initial feeling that something surprising could happen. However, the system quickly showed its limits.
The chain came loose, the assembly groaned under load, and the small motor entered a zone of effort incompatible with prolonged use.
The next scene was even more revealing. The smell of the motor cooking appeared early, and the conclusion was inevitable: that setup did not have enough torque to sustain what the electric bike demanded.
The problem was not whether to turn on or off. It was to transform a flashy electrical specification into repeatable mechanical traction without destroying the motor itself.
The project’s response was to look for another drone motor, still small but with more promising behavior.
The second model spun close to 15,000 rpm, half of the first. In theory, with half the maximum rotation, it could provide approximately double the torque for the same power.
That was the hypothesis. And, as the experiment itself recognized, there was only one way to verify it: by testing.
The assembly was also altered. The motor and pulleys were repositioned to another part of the bike to shorten the chain and avoid friction with the frame.
This should reduce the chance of the chain coming off again and improve the overall system’s performance.
In other words, the experiment was no longer just comparing motors; it was also comparing how much the electric bike needed to be tamed to accept that type of propulsion.
The Second Motor Worked Better, but Still Showed Where the Difference Lies

With the second motor, the experience changed levels. The electric bike actually performed better, accelerated with more conviction, and reached around 20 miles per hour during the observed measurement.
For such a small setup, the result was impressive. There was enough start to convince onlookers that the idea was not just a technical joke.
Even so, problems continued to arise.
The chain still required more tension, the system showed signs of wear near the pulley, and the motor’s temperature rose quickly, estimated to be between 104 and 122 degrees Fahrenheit shortly after one of the attempts.
This was still considered a safe zone, but the constant heating already suggested that the useful margin of that project was narrow.
The electric bike was functioning, but the setup was working near the threshold of pain.
Another important detail emerged in real use: it was necessary to pedal to start.
The motor did not deliver a comfortable and immediate output on its own as a more conventional system would.
This means the experience could even be fun, but it relied on human effort to get moving without excessive strain on the setup.
The gain in torque, therefore, did not erase the structural difference between an adapted drone solution and a motor designed from the ground up for an electric bike.
The second motor improved the test, but still did not change the logic of the result.
It proved that the idea can work; it did not prove that it is the smartest way to move the electric bike.
In the Final Race, the Traditional Motor Left the Theory on the Ground
The most direct comparison came at the moment of the start between the two systems. It was time to take the debate out of fascinating improvisation and place it face to face with reality.
The drone motor had already been showing intense heating and signs of absolute limits. Shortly thereafter, the system reached the point of melting the coils.
That was, in the words of the test itself, its ceiling.
Meanwhile, the traditional hub motor finished the contest almost cold. The thermal difference between the two setups spoke volumes compared to any nominal power slogan.
The conventional motor made it look easy what the drone system delivered at the cost of mechanical tension, heating, and structural suffering.
This contrast sums up the entire experiment. Yes, it is possible to move an electric bike with a very small drone motor.
But the most important question was never that.
The real issue was whether this would make sense against a motor specifically designed for that type of load, use, and operating regime.
The practical answer was harsh for the more exotic side of the dispute.
The drone motor won only in the fields of extreme lightness and technical curiosity. The traditional motor won in what matters most for a real electric bike: useful traction, thermal robustness, consistent delivery, and less dramatic operation.
In applied engineering, the most impressive component is not always the one that best solves the problem.
The experiment was valuable because it dismantled a common mental shortcut: the idea that equal watts are enough to place two motors on the same functional level.
In an electric bike, the conversation is more complex. Excessive rotation, need for reduction, transmission behavior, temperature, and available torque change everything.
The drone motor showed that miniaturization can go far, but it also showed where it begins to cost too much.
In the end, the test delivers a technically simple conclusion and visually strong.
Can you move an electric bike with a drone motor? Yes. Is it worth swapping out a traditional 6-kilogram system for this? Most likely not. If you had to choose between a lightweight, clever, and unstable solution or a heavier, cooler, and proven efficient setup, which side would appear more convincing for real-world use outside the lab?






-

2 pessoas reagiram a isso.