
 Portuguese
Portuguese  Spanish
Spanish 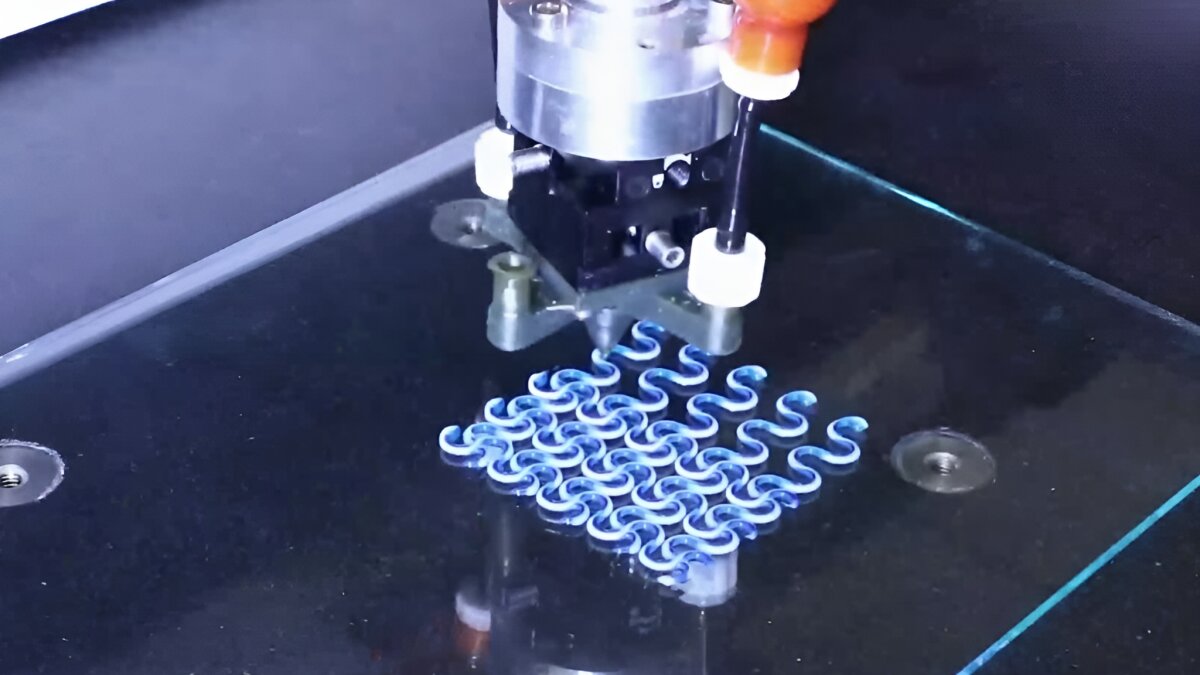
New 3D printing technique developed at Harvard creates soft filaments capable of changing shape with temperature, bringing soft robotics closer to structures inspired by biological muscles and programmable materials.
Researchers from the John A. Paulson School of Engineering and Applied Sciences at Harvard University have developed a 3D printing technique capable of producing soft filaments that bend, twist, expand, or contract when heated or cooled.
According to the institution, the method allows for organizing active and passive materials within the same structure, so that part of the movement is defined already in the manufacturing stage.
The research was published in the journal Proceedings of the National Academy of Sciences and describes a strategy called multimaterial rotational 3D printing.
-
Advancement in science: a new plastic developed by researchers in the USA combines structural strength and thermal blocking in a single technology, opening new possibilities for construction, transportation, electronics, and sustainable solutions with a direct impact on global energy efficiency.

-
A 17-year-old student created an artificial intelligent trash can that moves by itself through schools and parks, finds trash, separates waste with 90% success, and turns recycling into an automatic, mobile task that is harder to ignore in busy public spaces.

-
Detectorist finds 2,700-year-old bronze sword embedded vertically in forest in Poland; artifact may reveal ancient Bronze Age ritual
-
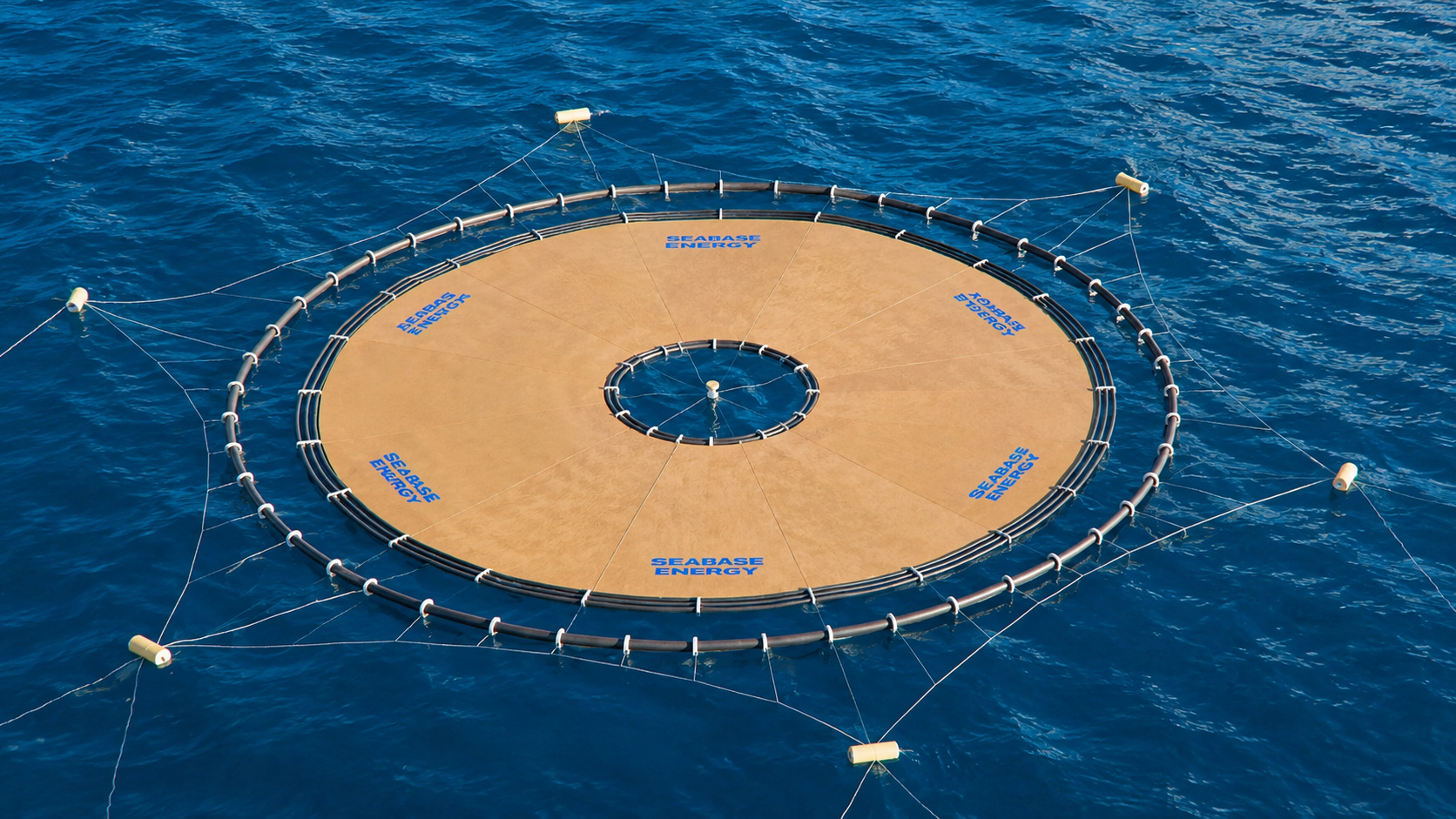
At the bottom of the Mediterranean, Italian engineers have sunk a “plant” in the shape of a giant donut that uses the ocean’s own weight to store energy, storing electricity generated by wind and sun at the sea floor and returning it to the grid without dams, mountains, or chemical batteries.



The process uses a printing nozzle that rotates while depositing different materials, allowing control over the internal composition of fiber-like filaments.
According to the authors, this architecture influences how each piece responds to thermal stimuli.
3D Printing and Nature-Inspired Movements
The proposal is based on flexible structures observed in living organisms.
In the article, the researchers cite examples such as proteins, plant tendrils, octopus tentacles, and elephant trunks, which can bend, curl, or take on different shapes depending on their internal organization and biological function.
In robotics, reproducing this type of movement requires solutions that combine control, deformation, and response to stimuli.
Conventional robots use electric motors, pneumatic systems, hydraulic components, and mechanical joints to perform tasks with precision.
These resources are widely used in industrial applications, but they do not always offer the flexibility needed to handle fragile objects or operate in less standardized environments.
Soft robotics seeks another path.
Instead of relying solely on rigid parts connected by joints, this field investigates materials capable of changing shape, distributing forces, and adapting to contact with irregular surfaces.
This approach is being studied for applications such as flexible grippers, medical devices, filtration systems, reconfigurable structures, and robotic components that need to interact with objects of different sizes and shapes.
Artificial filaments combine active and passive materials
In the study conducted at Harvard, researchers combined two types of elastomers, flexible materials with rubber-like behavior.
One of them is active: it is a liquid crystal elastomer, known by the acronym LCE, which contracts in a preferential direction when subjected to a certain temperature change.
The other is passive and functions as a part that resists deformation.
When the two materials are printed side by side, the difference between their physical responses produces movement.
The active part tends to contract, while the passive part maintains greater stability.
This combination makes the filament bend, twist, coil, or move according to the internal distribution defined during printing.
The rotating nozzle used in the process adds a second control variable.
As it prints the filament, it orients the molecular arrangement of the liquid crystal elastomer in helical patterns.
With this, researchers can alter the direction and intensity of the bending and twisting at different points of the structure.
This feature differentiates the technique from approaches based solely on the external shape of the piece.
In this case, the mechanical behavior is determined by the combination of geometry, material position, and molecular alignment.
According to the authors, the programming of the movement occurs within the filament itself, without the need to add gears, rigid hinges, or mechanisms mounted after printing.
Soft robotics tests claws, filters, and deformable structures
The team tested wavy filaments and flat networks formed by small repeated units.
In some demonstrations, visually similar structures exhibited different behaviors when heated.
Some contracted, while others expanded, depending on the position of the active material within each filament.
Networks capable of moving from a flat form to assume three-dimensional configurations, like dome-like structures, were also produced.
In another demonstration, researchers presented active filters that altered the opening of their pores according to the temperature.
When heated, these filters allowed the passage of particles; when cooled, they reduced the opening again.
The study also describes soft claws manufactured with the same logic.
These structures were designed to descend onto objects, close around them, lift the item, and release it afterward.
According to Harvard’s statement, the demonstration indicates possible uses in robotic manipulation, especially in systems that need to combine deformation and contact with varied surfaces.
These results remain in an experimental environment.
There is no indication, in the sources consulted, that the technique is ready to replace motors, industrial actuators, or robotic systems used in high-power applications.
What the work presents is a way to manufacture materials with programmed response, which can serve as a basis for new research in soft robotics and adaptive structures.
Artificial muscles remain a challenge in robotics
The idea of developing artificial muscles for robots has been studied for years.
The area includes pneumatic solutions, shape-memory metal alloys, electricity-activated polymers, magnetic materials, and cable-based systems that mimic tendon function.
Each approach meets specific demands but also presents technical limitations depending on the type of use.
Pneumatic systems, for example, may depend on compressors, valves, and hoses.
Some polymers require high electrical voltages.
Other materials respond more slowly, require heating, or impose manufacturing constraints.
In many cases, the actuator responsible for movement needs to be integrated into a broader mechanical structure to function.
The technique described by Harvard attempts to reduce part of this dependency by incorporating deformation behavior into the printed material.
Even so, the term “muscle” should be understood as a functional comparison, not as an equivalence to human tissue.
Biological muscles involve fibers, nerve signals, blood supply, cellular metabolism, and coordinated control by the nervous system.
In the case of the printed filaments, movement occurs through the response of synthetic materials to temperature changes.
The similarity lies in the ability to produce contraction, twisting, and bending, but the physical mechanism is different from that observed in living organisms.
Technology still depends on tests outside the laboratory
Thermal activation is one of the main limitations pointed out by the very nature of the experiment.
Since movement depends on heating and cooling, factors such as response time, energy consumption, and temperature control need to be considered before any application outside the laboratory.
Another point is the scale of use.
The demonstrations show that multimaterial rotational 3D printing can produce filaments and networks with programmable movements, but do not establish a timeline for commercial application.
There is also not enough data in the consulted sources to state how the technique would behave in continuous operation, in outdoor environments, or in robotic systems subjected to greater loads.
The authors point to possible applications in adaptive robotic grippers, active filters, biomedical devices, reconfigurable valves, and structures that change shape on demand.
These possibilities appear as research paths, not as available products.
Before that, durability tests, cycle repetition, safety, integration with sensors, and compatibility with control systems would be necessary.
The research is part of an investigation line that seeks to transfer part of the mechanical control to the material itself.
Instead of relying solely on software, motors, and articulated parts, these systems use internal composition and geometry to guide the physical response of the structure.
This type of development helps explain why soft robotics has attracted interest in engineering, materials science, and bioinspiration laboratories.
For tasks involving delicate contact, adaptation to varied shapes, or reversible configuration changes, programmable materials may offer alternatives to conventional rigid mechanisms.
It is not yet about robots indistinguishable from humans or artificial muscles equivalent to those of the body.
The study shows, more narrowly, that filaments printed with active and passive materials can perform movements defined by their internal architecture.




