 Portuguese
Portuguese  English
English  Spanish
Spanish 
Swiss Engineers Create a Rescue Robot Capable of Climbing Stairs Efficiently, Allowing Emergency Teams to Operate in Hard-to-Reach Places. Discover How This Technology Can Transform the Future of Rescue Operations.
The advances in robotics continue to transform the way robots interact with the world, and the latest milestone comes from ETH Zurich, which enhanced the quadruped robot ANYMal to tackle a common challenge: climbing stairs.
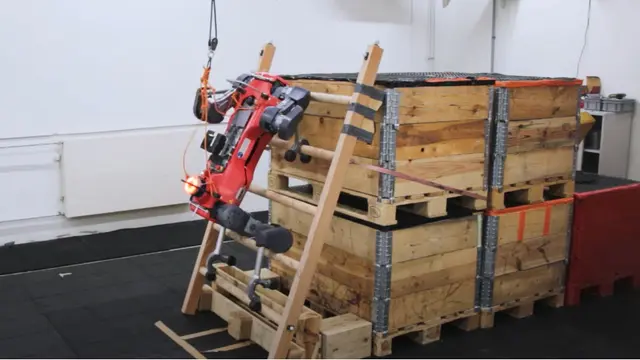
The university’s Robotics Systems Lab developed an innovative solution, creating custom hook-shaped legs for the ANYMal, enabling it to ascend standard stairs with impressive efficiency. This innovation is a major step toward making quadrupedal robots more versatile in industrial and rescue environments.
The Evolution of ANYMal
The ANYMal robot was already recognized for its ability to move across uneven terrain, but climbing stairs posed a barrier. ETH Zurich addressed this challenge by modifying the robot’s leg design.
-
Why intelligent life may be extremely unlikely in the universe? Physics, evolution, and statistics challenge one of humanity’s greatest beliefs.

-
The government opens the budget to pay pensions and ends up targeting precisely the FAB’s Gripen fighter jet; the reason for the R$ 800 million block reveals a fragility that has haunted the country’s defense projects for decades.

-
A potato-shaped object over a mountain and orbs multiplying in the sky are among the 72 new files from the Department of Defense that do not prove extraterrestrial life.
-
Family struggling with the electricity bill at the end of the month finds an air conditioner that consumes little and costs only R$ 21 per month; LG device cools the room 40% faster and also comes with a detail that grabs attention.




Instead of attempting to adapt traditional claws or hands, engineers drew inspiration from how humans naturally form hooks with their hands when ascending stairs.
The team developed hook-shaped legs that can firmly grip the steps, providing a secure and stable hold. In addition to the hardware, the robot was trained to use these new legs through reinforcement learning, an approach that uses simulation to teach the robot to climb stairs effectively and quickly.
This method, called the teacher-student paradigm, involves a teaching robot instructing student robots to confront different climbing scenarios.
Performance and Real-World Testing of the Rescue Robot
After training, ANYMal was subjected to tests on real stairs. The results were impressive: the robot achieved a success rate of 90% when climbing stairs with angles ranging from 70° to 90°. This represents a significant improvement over previous versions of ANYMal, which struggled with this type of terrain.
The design of the hooks allowed the robot to overcome unstable and poorly positioned stairs, maintaining consistent performance even during unexpected disturbances.
Moreover, ANYMal demonstrated a climbing speed 232 times faster than the previous state of the art in quadrupedal robots. The robustness of this new system is evidenced by a success rate of 96% in simulations that included challenging terrains and randomly generated scenarios.
Quadrupedal Robots and Stair Climbing
Climbing stairs has been a challenge for both quadrupedal and humanoid robots. While legged robots are generally more effective than wheeled robots on uneven terrain, stairs represent a significant obstacle.
The inability to navigate stairs limits the usability of these robots in industrial and rescue environments, where stairs are common.
Previous research on climbing humanoid robots highlighted limitations in terms of speed and adaptability to different types of stairs.
Similarly, quadrupedal robots faced difficulties in ascending vertical stairs. ETH Zurich overcame these challenges by combining the innovative hook leg design with reinforcement learning, resulting in an effective solution for climbing stairs.
Hooked on Success
The reinforcement learning approach used by ETH Zurich enabled ANYMal to become not only efficient at climbing stairs but also more adaptable to different conditions.
By utilizing extensive simulations with randomly generated terrains, student robots learned to handle a variety of situations, developing robust climbing skills more quickly and efficiently.
In addition to real-world testing, the team plans to incorporate new sensors, such as depth cameras, to further enhance ANYMal’s ability to ascend and descend stairs. This will open new possibilities for the use of quadrupedal robots in hazardous environments, such as rescue operations in hard-to-reach areas.

Future of Operations with Quadrupedal Robots
Although the current design of the hooks has proven extremely effective, the engineering team at ETH Zurich recognizes that there is room for improvement. Future research will aim to further enhance the design of the hooks and the robot’s control to improve its performance across a wider range of activities.
This development represents a significant advancement for the use of quadrupedal robots in a variety of sectors, including industrial inspections, rescue operations, and even missions in high-risk areas. With enhanced mobility, ANYMal is one step closer to becoming an essential tool in challenging environments.
In summary, the success of the ANYMal robot in overcoming stairs with custom hooks demonstrates the power of innovative design combined with advanced machine learning techniques. As research continues to evolve, the future of robotics looks promising, with increasingly adaptable and efficient solutions to tackle real-world challenges.




Be the first to react!