
 Portuguese
Portuguese  Spanish
Spanish 
Space exploration could take a leap with remotely controlled robots designed to operate on the Moon and Mars. Discover how the initial tests indicate that this technology may be the future of exploring new worlds!
Space exploration is about to take a new step with the use of remotely controlled robots to operate in hostile environments like the Moon and Mars.
Advancements in robotic vehicle teleoperation have shown great potential, allowing humans on Earth to handle tools and equipment in space with precision. These space exploration robots can perform complex tasks such as sample collection, excavation, and structure assembly on distantmoons.
Promising Initial Tests
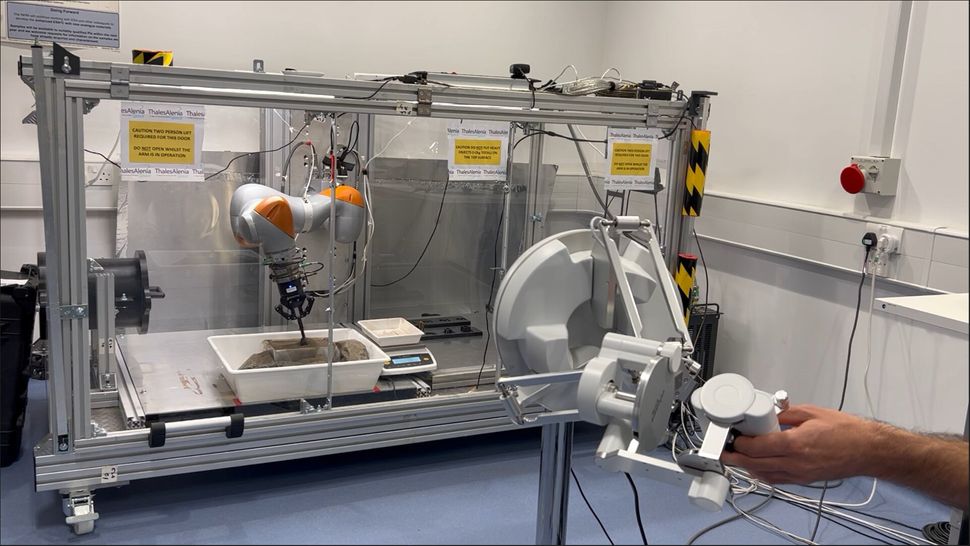
Recently, the robotics laboratory at the University of Bristol, in England, tested an innovative teleoperation system at the European Space Agency’s (ESA) European Space Applications and Telecommunications Centre.
-
James Webb Telescope Uncovers Unexpected Clues on Mysterious Moon, Potentially Redefining Planetary Origins

-
$1.5 Billion Sleipnir Vessel Transforms Ocean into Floating Construction Site with 12 Hybrid Engines and Capacity to Lift 20,000 Tons

-
23 Years After Tragedy, Brazil’s Alcântara Space Center to Launch New Suborbital Rocket in 2026 with South Korean SEBIT Project Targeting Near-Space Tests
-
Entrepreneur Turns Neighbor’s Coffee Grounds Waste into Eco-Friendly Pellets, Earning Up to $40,000 Monthly in Brazil



The team was able to remotely operate a robotic arm to excavate a sample of simulated lunar regolith using a virtual simulation. This technology eliminates the need for live images, which can experience delays due to the distance between Earth and the Moon.
The signal delay between the two celestial bodies is about 1.3 seconds, which can be sufficient to hinder precision in delicate operations.
However, with the teleoperation system, signals can be relayed through satellites, such as those planned under ESA’s Moonlight project, which aims to improve lunar communication.
Space Exploration: Sensing the Lunar Environment
One of the biggest advantages of this technology lies in haptic interactions, which provide a sense of touch to the operator. This means that teleoperators on Earth can feel the resistance of lunar soil as if they are actually digging in an environment with one-sixth of Earth’s gravity.
The Bristol team tested this functionality in simple tasks, such as pressing the soil or dragging a shovel, but still plans to advance to more complex missions.
According to Joe Louca, one of the project leaders, the ability to adjust the gravity intensity in the simulation allows for astronaut training in a real lunar environment. He emphasizes that tactile feedback provides a realistic sense of how lunar dust would behave.
Overcoming the Trust Challenges
Before putting this technology into practice, there are still psychological challenges to overcome. One of the biggest issues is operators’ confidence that the virtual system is genuinely reflecting the physical reality in space. Studies have already shown that this lack of confidence can be a barrier to the full use of teleoperation.
However, Louca’s team has achieved positive results in tests. During the simulated regolith collection, the system was 100% efficient and 92.5% reliable.
Although dumping the regolith was a slightly less accurate task, they identified that adjustments in the orientation of the robot’s scoop improved performance.

Future Applications on Mars
While the initial focus is on the Moon, robot teleoperation could also play a crucial role in future missions to Mars.
Recovering Martian soil samples is an extremely challenging task, and remotely controlled robots could assist in collecting and transporting samples to vehicles that would bring them back to Earth.
The NASA Mars sample return project, for example, is already facing budget and schedule challenges. Rocket Lab, the company contracted by NASA, is conducting studies to develop a solution, and it is possible that teleoperation may be integrated in the future. However, the use of this technology for Mars is still in the early exploration stages.
As space missions advance in the coming years, such as NASA’s Artemis program and China’s Chang’ e, the use of teleoperated robots may be a valuable tool to support both crewed and uncrewed missions.
The ability to train astronauts and perform complex operations remotely makes this technology a promising future for space exploration.





