
 Portuguese
Portuguese  Spanish
Spanish 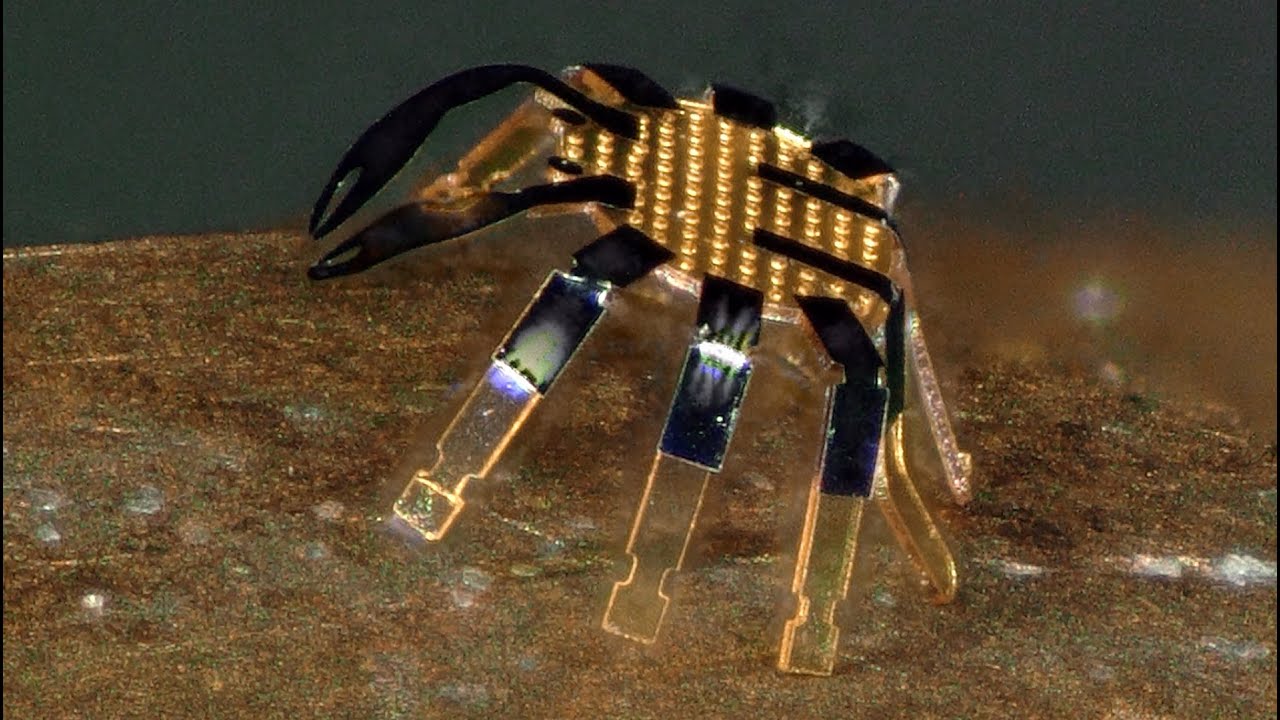
Northwestern microrobot measures 0.5 mm, moves without motors using heat, and can revolutionize medical and technological applications.
In May 2022, researchers from Northwestern University in the United States presented one of the smallest robots ever developed: a crab-shaped microrobot measuring just 0.5 millimeters wide, smaller than a flea and practically invisible to the naked eye. The study was published in the scientific journal Science Robotics and detailed by the university itself in an official statement released at the same time.
The project was led by engineer John A. Rogers, an expert in materials and bioinspired systems, and researcher Yonggang Huang, focusing on applied mechanics and microengineering. The central goal was to demonstrate that robotic structures can operate at extremely reduced scales without relying on conventional motors, batteries, or traditional electronic systems.
The result was a functional microrobot capable of walking, crawling, turning, and even jumping, using only thermal stimuli to generate movement. This approach breaks with the classic paradigm of robotics, which relies on electromechanical components, and paves the way for a new generation of miniaturized devices.
-
Distant Galaxy Shaped Like a Giant Jellyfish Sheds Gas, Forming New Stars as It Moves Through Hot Cosmic Gas

-
Nearly 40% of Treated Water in Brazil is Lost Before Reaching Homes; Companies Use Satellites, AI, Helium, and Innovative Tech to Improve Access in Remote Areas

-
Steel Sphere Cylinder Achieves 14% Damping in Tests, Functions Without Sensors or Electricity, and Can Reduce Vibrations in Skyscrapers, Bridges, and Sensitive Equipment with US Patent Registered
-
Artist’s 15-Meter Lighthouse in the Mojave Desert, 160 km from the Sea, Intrigues Visitors with 19 km Range After Years of Bureaucracy





The robot’s structure uses shape memory alloys that deform and return to their original shape when heated
The operation of the microrobot is based on a physical principle known as shape memory. The device is constructed from a special metallic alloy that can be deformed and, when heated, returns to its original shape.

In the case of the robotic crab, this material is shaped into a microscopic structure with multiple articulated “legs.” When subjected to temperature variations, specific parts of the structure contract or expand, generating movement.
This mechanism eliminates the need for motors, gears, or internal electrical circuits, making the robot extremely lightweight and compact.
The movement is controlled through external heat sources, such as directed lasers, which heat specific regions of the robot and induce controlled deformations.
The movement of the microrobot is generated by thermal cycles that allow walking, turning, crawling, and jumping in different directions
Unlike traditional robots, which use motors to generate continuous movement, the Northwestern microrobot operates through rapid thermal cycles.
When an area of the material is heated, it contracts. When it cools, it returns to its original position. By repeating this process in sequence, it is possible to generate movement patterns.
This system allows the robot to perform different types of locomotion, including walking, rotation, and even small jumps, depending on how heat is applied.
The precision of control depends on the intensity and location of the thermal stimulus, which requires highly calibrated external systems.
Crab-inspired design allows stability and efficiency even at microscopic scale
The choice of crab shape is not just aesthetic. This type of structure offers important biomechanical advantages.
Crabs have multiple legs distributed laterally, providing stability and the ability to move in different directions. By replicating this design on a microscopic scale, researchers have managed to create a robot that maintains balance even on uneven surfaces.
Bioinspiration was key to transforming a physical concept into a functional system, capable of operating in real conditions.
In addition to the crab, the team also developed other shapes, such as caterpillars and small insects, demonstrating the versatility of the technique.
Manufacturing process uses microfabrication techniques similar to those of the semiconductor industry
The construction of the microrobot involves advanced microfabrication processes, similar to those used in the production of electronic chips.
Structures are created from flat sheets of material that are later transformed into three-dimensional shapes through controlled internal stresses.
This method allows for the production of multiple robots on a large scale, with high precision and repeatability, which is essential for practical applications. The ability to manufacture these devices in large quantities is one of the factors that makes the technology promising for real use.
Potential applications include medicine, microsurgery, and operations in environments inaccessible to conventional machines
One of the most promising areas for this type of technology is medicine. Microrobots of this size could, in theory, be used to navigate inside the human body.
They could perform tasks such as:
- localized drug administration
- removal of obstructions in vessels
- internal monitoring of tissues
The reduced size allows access to areas where conventional instruments cannot reach, which can transform medical procedures.
In addition, these robots can be used in extreme environments, such as confined spaces, complex industrial structures, or even scientific missions on a microscopic scale.
Current limitations include precise control, energy supply, and integration with autonomous systems
Despite the advancements, the technology still faces significant challenges. One of the main ones is precise control in complex environments.
Currently, movement depends on external heat sources, which limits the robot’s autonomy. Additionally, the absence of embedded systems makes it difficult to perform more complex tasks.
Integration with sensors, communication systems, and miniaturized power sources is still an open challenge in research. These limitations indicate that the technology is still in an experimental stage, although with high potential for evolution.
Comparison with traditional robotics shows disruption in the concept of movement and miniaturization
Most current robots rely on electric motors, batteries, and relatively large electronic systems. This imposes physical limits on the minimum size of these devices.
The Northwestern microrobot represents a paradigm shift by eliminating these components and using alternative physical principles.

This approach allows for a drastic reduction in the size of robots without losing basic functionality, something that would not be possible with conventional technologies. This disruption may influence the development of future generations of robots in various fields.
Publication in Science Robotics validates advancement and positions technology at the forefront of microengineering
The study was published in the journal Science Robotics, one of the leading scientific publications in the field of robotics. This indicates that the work underwent rigorous review and was deemed relevant by the scientific community.
Furthermore, the announcement by Northwestern University itself reinforces the credibility of the information. The combination of scientific validation and practical application makes the microrobot one of the most relevant recent advancements in the field of microengineering.
This type of recognition is essential for attracting investments and accelerating the development of the technology.
What this microrobot reveals about the future of invisible machines and engineering on a microscopic scale

The 0.5-millimeter robotic crab shows that it is possible to build functional machines at extremely reduced scales, using alternative physical principles.
This paves the way for a new generation of devices capable of operating in environments where current technology cannot reach. The combination of smart materials, bioinspiration, and microfabrication could redefine the concept of robotics in the coming decades.
As technical challenges are overcome, the impact of this technology could expand into areas such as medicine, industry, and scientific exploration.
Do you believe that microrobots of this size could be used inside the human body in the coming years?
The evolution of this technology raises an important question about its limits and future applications. If robots smaller than a flea can already move and perform basic actions, how far can this miniaturization go and what will be its practical implications in the real world?




