
 Portuguese
Portuguese  Spanish
Spanish 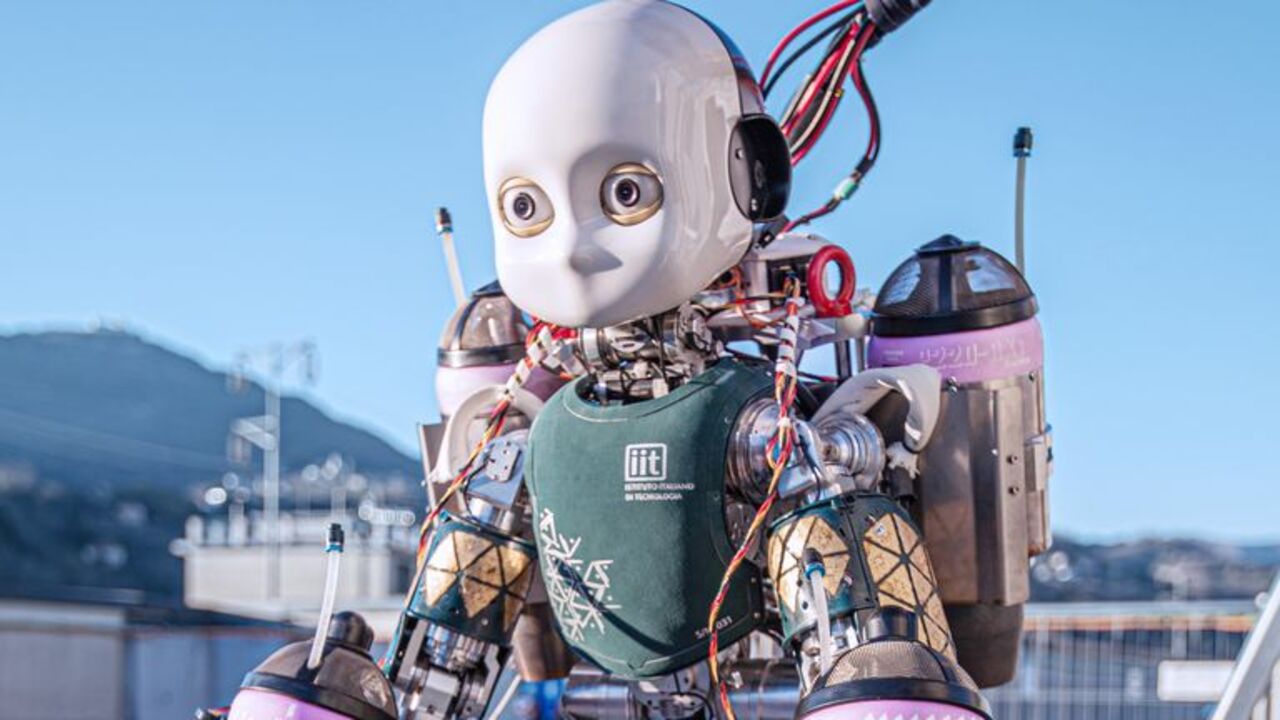
Baby-Faced Robot With Jetpack Successfully Performs Vertical Flight and Makes History in International Robotics With Innovative Technology
A robot with a baby face and a jetpack has made history. Named iRonCub MK3, it has become the first humanoid to successfully fly vertically.
The feat was accomplished by researchers from the Italian Institute of Technology (IIT) and was recorded on video, published on the institute’s official YouTube channel on the 18th.
Developed from the iCub platform, the robot is about 1 meter tall and weighs 22 kilograms. Its appearance resembles that of a baby, with a smooth and shiny face.
-
Helicopter Drops 180 Tons of Sand and Gravel on Swedish River to Revive Ecosystem Damaged by Decades of Exploitation

-
Brazilian Company Launches Retro Smartphone with 48 MP Camera, T9 Keyboard, and Privacy Features for Social Media-Free Use

-
Self-Taught Chinese Farmer Builds 5-Ton Submarine from Scrap, Launches It in Anhui River
-
Invisible Induction Technology Enables Wireless Power for Blenders, Coffee Makers, and Air Fryers, Reducing Countertop Cables





The original project emerged in 2009, within a European consortium focused on the study of human cognition and artificial intelligence.
To enable flight, engineers made several modifications to the structure. Four thrusters were installed—two in place of the arms and two in a backpack on the back.
In addition, a new titanium spine was created, capable of supporting the jetpack assembly and the necessary supports for balance.
The previous versions of the robot faced overheating issues. Therefore, the new model received heat-resistant panels and coverings, capable of withstanding temperatures above 600 °C.
The MK3 version still lacks forearms and hands. These elements were removed to make room for the thrusters. However, according to the researchers, these components are compatible and are expected to return in future versions of the project.
The flight control is managed by a system called Model Predictive Control (MPC), which calculates the ideal joint positions and the necessary thrust in real-time.
The initial tests were conducted in simulations and analyzed using the Finite Element Method (FEM), an engineering technique used to predict complex physical behaviors.
After many adjustments and validations, the iRonCub MK3 was able to take off with stability. Now, the team’s focus is on preparing the robot for flights in windy and adverse weather conditions, expanding tests in real situations.
With information from Canal Tech.





Be the first to react!