Portuguese
Portuguese  Spanish
Spanish 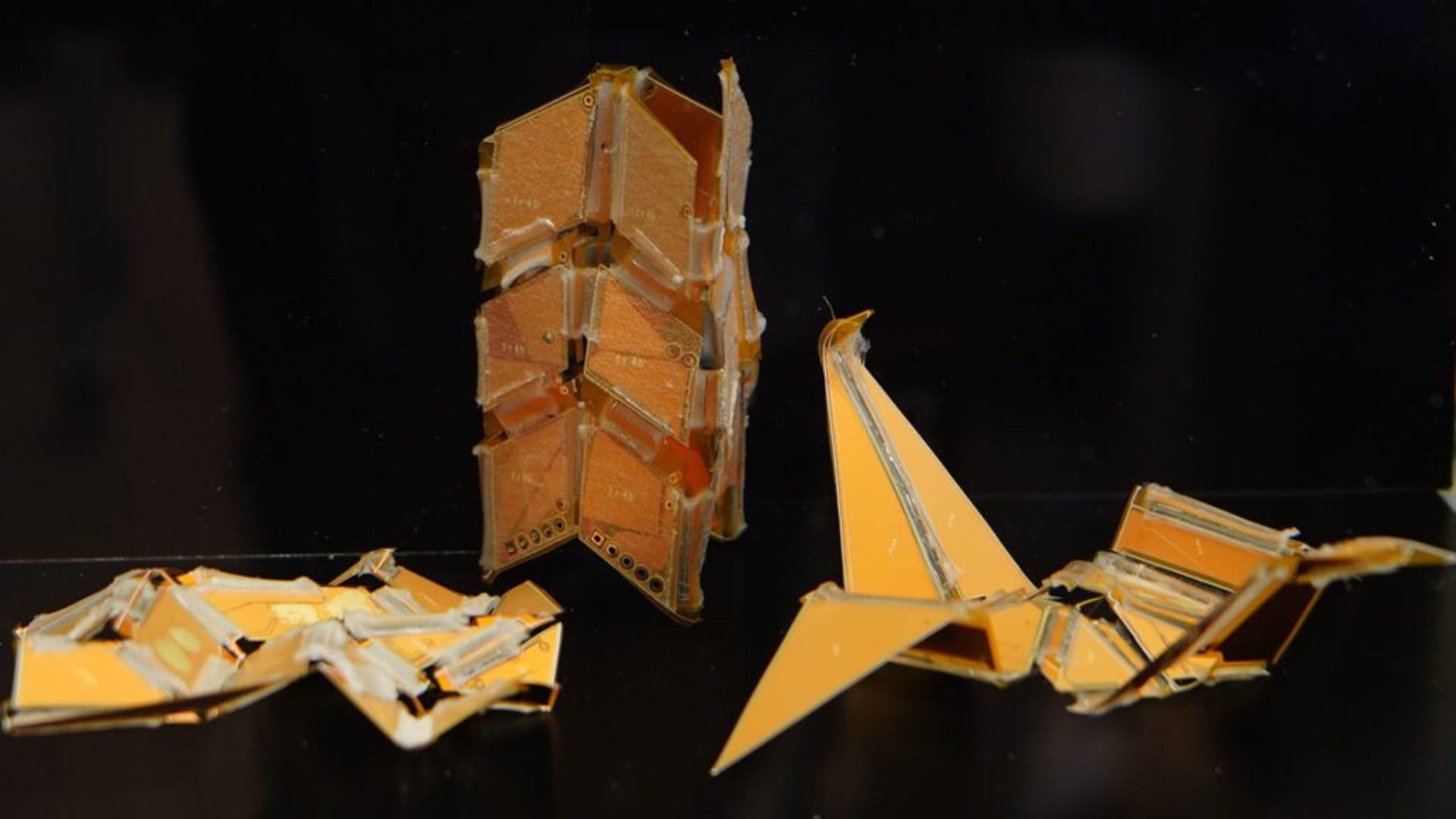
3D printing technology and elastomers enable soft robots to operate with integrated circuits and thermal contraction.
Engineers at Princeton University have developed a 3D printed flexible robot capable of moving and changing its shape using heat, eliminating the need for external motors or pneumatic systems. The hybrid device combines a printable polymer with flexible electronics and origami-based folding techniques to achieve precise movements.
The technological advancement, led by professors Emily Davidson and Glaucio Paulino, utilizes a material known as liquid crystal elastomer (LCE).
This substance has an ordered molecular structure that allows for controlled thermal contraction. When electricity is applied, flexible printed circuit boards embedded in the material heat specific areas, triggering movement without traditional mechanical components.
-
In Andradina, in the interior of SP, a tannery transformed tilapia skin that slaughterhouses used to throw away into exotic leather for bags, shoes, and even wedding dresses, producing about 2,000 pieces per month and exporting to seven countries, proving that fish waste has become high-value fashion.

-
The industrial waste that even recyclers didn’t want has gained value in the interior of Bahia: two entrepreneurs invested R$ 2.8 million to transform 350 tons per year of foam, rubber, and plastic into boards that can replace wood and MDF.

-
What is a red flashlight used for, after all? See why it is so commonly used at night.

-
He has never read a line of code, but he already knows how to work: the French company UMA presented in Paris the Northstar, its first AI-powered humanoid robot designed for factories and warehouses, capable of copying tasks just by observing an employee in action.



Origami-inspired design and functionality
The team demonstrated the effectiveness of the technology by constructing a flexible 3D printed robot in the shape of a crane, a classic figure from Japanese origami. When electric current flows through the internal circuits, the generated heat causes the polymer hinges to contract, resulting in the flapping of the structure. This method allows the robot to perform programmable movement sequences in real-time while maintaining the ability to return to its original shape.
To ensure that the folding occurs only at the desired locations, the researchers reinforced the sections between the hinges with thin fiberglass panels.
These panels are directly attached to the flexible circuits, creating rigid zones that direct the force of thermal contraction. This hybrid configuration ensures that the 3D printed flexible robot performs smooth and coordinated movements, simulating the fluidity of biological organisms.
Precision and durability in manufacturing
The manufacturing of the device uses a customized 3D printer that deposits the molten polymer in standardized zones. During the process, electronic circuits and temperature sensors are integrated directly into the body of the robot, rather than just applied to the surface. This deep integration is crucial for the operation of the 3D printed flexible robot, as it allows for closed-loop control over the heating of the joints.
Laboratory tests indicated that the system can operate repeatedly without showing signs of wear or significant degradation.
The absence of gears and air tubes drastically reduces the weight and complexity of the design, increasing the durability of the structure. The 3D printed flexible robot has proven capable of following precise commands, confirming the feasibility of using smart materials to replace conventional propulsion systems.
Application potential and autonomy
The ability to move in confined spaces where traditional robots would fail is one of the main advantages of this innovation.
Since the 3D printed flexible robot does not rely on external pumps or bulky motors, it offers a compact solution for complex navigation tasks. The system responds quickly to thermal variations, allowing for immediate adjustments in the trajectory or posture of the device during operation.
The research, detailed in the journal Advanced Functional Materials, paves the way for the development of more autonomous and adaptable soft machines. The use of liquid crystal elastomers and embedded electronics sets a new standard for soft robotics, focusing on material efficiency.
Future models based on the 3D printed flexible robot could be applied in various fields requiring delicate movements and high structural resistance.
Click here to access the study.