
 Portuguese
Portuguese  Spanish
Spanish 
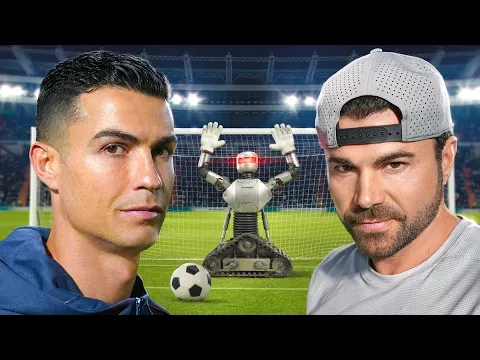
Cristiano Ronaldo Surpasses Robotic Goalkeeper Equipped With 22 Cameras at 500 Fps, 50-Horsepower Motors and System That Calculates Trajectories in 6 Milliseconds, After Series of Tests Conducted by Mark Rober With Thousands of Collected Data.
Mark Rober developed a robotic goalkeeper with sensors, motors, and high-speed processing to test whether engineering could block shots from Cristiano Ronaldo in an experiment conducted after extensive collection of technical data.
Evolution of the Engineering Project
The former NASA engineer started the project after scoring a goal at Wembley in front of 90,000 people, because he decided to explore whether machines could surpass athletes in extreme sporting conditions.
The experience motivated contact with Landon Donovan, who suggested basic training that Rober was unable to fulfill, thus he opted to build a structure capable of compensating for personal physical limits.
-
China Develops Custom 140-Ton Electric Mining Truck with 770 kWh Swappable Battery, Deploys 290 Units in Xinjiang’s Largest Zinc Mine

-
Meta to Launch Arena, a New Prediction App Targeting 3.56 Billion Users, Competing with Polymarket and Kalshi

-
Scientist Challenges Famous Human Evolution Theory, Argues Homo Sapiens Evolved Gradually Over Thousands of Years
-
15-Year-Old American Builds Ocean Generator with PVC Pipe and 3D-Printed Propeller for $12, Wins National Prize, Presents at White House, and Makes Forbes 30 Under 30 List



The first versions only exhibited simple horizontal movement, but requirements quickly escalated as tests advanced and revealed the need for faster responses and greater operational precision.
Rober incorporated 22 OptiTrack infrared cameras filming at 500 fps to track reflective stickers on the ball and generate three-dimensional maps in real time.
The computational system processed data every six milliseconds, sending commands to 50-horsepower motors that propelled a carbon fiber cart at over 64 km/h.
Pens could reach 128 km/h from 11 meters, covering that distance in less than 250 milliseconds, and required instantaneous calculations that humans could not execute.
Data Collection and Structural Failures
Rober invited young American shooters to provide thousands of data points, because he needed to record curves, straight shots, and volleys that refined the algorithm in real situations.
Some shots broke padding, cracked components, or tore parts of the mechanical arm, creating a continuous cycle of testing and rebuilding within the warehouse adapted as a workshop.
The machine received reinforcements with fiber trusses, denser foam, and motors increased to 250% of nominal power, which ensured greater mechanical resistance during intense sessions.
The high-speed recorded information allowed the robot to begin blocking shots from amateur and college players, although it still exhibited occasional inconsistencies.
Precision progressively improved because the set of stored trajectories helped the computer predict movements with an approximate margin of one millimeter, adjusting responses almost instantaneously.
A typing error occurred during internal recording but did not compromise the progress of the tests, as the sensors continued to deliver usable data.
Facing Cristiano Ronaldo
The test with Ronaldo became the pinnacle of the experiment, as it represented a direct confrontation between automated calculation and the trained instinct of one of the greatest strikers of the current era.
The robot traversed the area with superior speed to that of humans and analyzed the trajectory almost immediately, thus it seemed technically ready for high-level matches.
Ronaldo studied the cut in the rail and identified a small opening beyond the reach of the mechanism, taking advantage of this zone to execute a precise shot.
The technique that made him a worldwide reference allowed him to place the ball precisely in the inaccessible region, even with the continuous tracking of high-frequency cameras.
Other athletes from colleges and high schools had failed to surpass the robot, but Ronaldo demonstrated mastery of space and quick perception to exploit the vulnerable point.
The moment represented a new set of challenges for Rober, as it showed that additional adjustments would be necessary to eliminate dead zones in lateral movement.
Rober considered the result another stage of evolution, as each previously faced failure had generated structural improvements and important software adjustments.
The experience reinforced that experiments with engineering applied to sports often produce unexpected situations, creating connections between technology and human performance.
Even without achieving perfect blocking against Ronaldo, the project consolidated extensive technical learning about kick dynamics, mechanical limits, and automated reaction speed.
The conclusion marked the transition from the current prototype to possible future versions, which may enhance resistance, precision, and coverage of areas still unprotected by the system.
Behind the scenes, Rober documented smaller details of the process, including screw adjustments, camera calibration, and minor daily repairs that, although discreet, supported the entire structure of the experiment.






Amei!