Portuguese
Portuguese  Spanish
Spanish 
Japanese robot only 8 centimeters showed that lunar exploration can also advance with small, autonomous machines inspired by toy technology
A Japanese robot the size of the palm of a hand gained prominence in space exploration by transforming on the Moon’s surface and capturing a historic image of the SLIM mission, by the Japan Aerospace Exploration Agency, JAXA. Called SORA-Q, the equipment was sent as part of the Smart Lander for Investigating Moon module and operated autonomously in an extreme environment.
The story returned to debate after the publication of a study in the journal Science Robotics, in 2026, detailing how the small rover managed to move on the lunar soil, select images, and transmit data without relying on direct control from Earth. The achievement draws attention because it shows a different path for future missions: instead of relying solely on large vehicles, exploration can use compact, lightweight, and distributed robots.
The SORA-Q, also identified as LEV-2, was developed in partnership between JAXA, TOMY Company, Sony Group Corporation, and Doshisha University. The proposal combined space engineering, sensors, image processing, and toy industry experience in compact transformation mechanisms.
-
DNA Analysis Reveals How Five Cattle Survived Over 130 Years on a Deserted Brazilian Island

-
Private Spacecraft Intercepts Another for First Time in History During U.S. Space Force Mission Completed 11 Hours Early with Rocket Launched in Record 16 Hours

-
Scientists Predict Earth’s Habitable Lifespan: 1.8 Billion Years Before Oceans Evaporate and Sun Forces Planet Out of Life Zone
-
LG Unveils XBOOM Stage 501 Portable Speaker with 25-Hour Battery, AI Karaoke, and Sound by will.i.am in Brazil





Despite its curious appearance, the robot was not a toy taken to the Moon. It was a technological demonstrator prepared to test autonomous mobility, communication between robots, and operation on lunar terrain, points considered important for future scientific and planetary exploration missions.
SORA-Q brought toy technology to a real mission on the Moon

According to JAXA, the development of the robot began from a research initiative with TOMY Company in 2016, aiming to create a small, inexpensive robot capable of operating both in space and on Earth using toy-inspired technologies. Sony joined the project in 2019, while Doshisha University began participating in 2021.
The result was an ultracompact rover with about 8 centimeters in diameter before transformation and an approximate weight of 250 grams, according to information released by Sony. For a lunar mission, these dimensions are relevant because every gram launched into space impacts cost, energy consumption, and complexity of integration with the spacecraft.
TOMY reported that the SORA-Q was designed to exit the module in a spherical shape and, upon reaching the surface, open its structure to become a small vehicle capable of moving. The technology leveraged the company’s accumulated knowledge in compact mechanisms but adapted to a much more severe environment than any consumer product.
Robot was launched with the SLIM mission before transforming the lunar surface into a laboratory
The SLIM mission was launched from the Tanegashima Space Center in Japan on September 7, 2023, aboard the H-IIA rocket. According to JAXA, the main objective was to demonstrate a high-precision landing technology, called “pinpoint landing,” essential for future missions that need to land near craters, slopes, icy regions, or specific points of scientific interest.
The landing occurred on January 20, 2024, Japan time, making the country the fifth to achieve a soft landing on the Moon. JAXA reported that the module communicated with Earth after touching down, but ended up in a different position than planned, which prevented the immediate generation of power by the solar panels.
Despite this issue, the Japanese agency confirmed that SLIM landed about 55 meters east of the original target. The precision before the final obstacle avoidance maneuver was evaluated at approximately 10 meters or less, which allowed JAXA to state that the landing demonstration within a 100-meter margin was achieved.
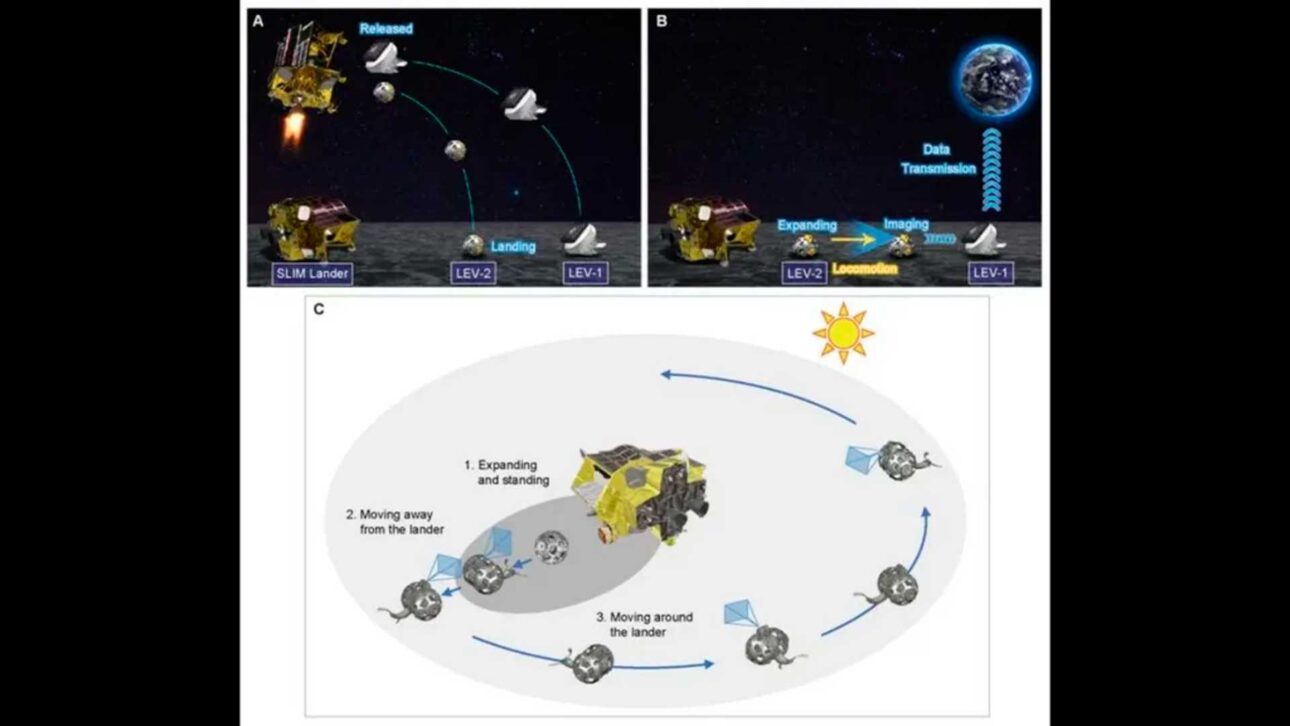
It was in this delicate context that the small vehicles LEV-1 and LEV-2 were separated shortly before landing. The SORA-Q, or LEV-2, had the mission of capturing images of the module and surroundings, while the LEV-1 functioned as part of the data relay system.
How the sphere transformed into a rover on the lunar surface
The SORA-Q traveled to the Moon in a spherical shape, a solution that facilitated transport and reduced the volume occupied within the mission. Once released, the robot opened its structure and transitioned to a wheeled configuration, using the two halves of the sphere as locomotion elements.
Sony explained that the system also included a camera and embedded processing features to allow the rover to recognize the SLIM module and choose useful images for transmission. The equipment was not designed for long distances, but for an objective task: move close to the lander, photograph, and send critical information.
The communication was also designed to save energy and simplify the robot. Instead of transmitting directly to Earth, the SORA-Q sent data to the LEV-1, which then relayed the information to the mission controllers.
According to the joint release by JAXA, Sony, TOMY, and Doshisha, the image captured by the SORA-Q confirmed several stages at the same time: the transformation of the robot, its movement on the lunar surface, the capture of images, the autonomous selection of data, and the wireless communication with the LEV-1.
Landing photo helped explain why SLIM ended up in an unexpected position
The image taken by the SORA-Q became one of the most important of the mission because it showed the SLIM on the lunar surface in an abnormal position. According to JAXA, technical data indicated that one of the two main engines likely lost thrust at about 50 meters altitude, before the start of the obstacle avoidance maneuver.
Even so, SLIM’s onboard software identified the anomaly and continued the descent with the other engine, trying to control the horizontal position as much as possible. The agency reported that the contact speed with the ground was within the design range, but the attitude and lateral speed contributed to the module ending up in a different position than planned.
At this point, the SORA-Q played a role that goes beyond technological curiosity. By photographing the module on the Moon, the small rover provided visual evidence to assess the landing outcome, helping engineers better understand the spacecraft’s behavior after touching down.
2026 study shows why small robots can be useful in future missions
The study published in Science Robotics, presented in June 2026, detailed how the LEV-2 SORA-Q managed to perform autonomous lunar exploration on an extremely small scale. The research describes the robot as a platform capable of navigating around the lander, capturing images of the module and the environment, and transmitting the selected data via wireless communication.
According to the scientific coverage by Phys.org on the article, the SORA-Q operated for about 108 minutes before losing communication. The time was short, but sufficient to demonstrate that microrobots can perform useful tasks in missions where size, weight, energy, and cost are limited.
The mission also revealed significant challenges. Very small robots have less battery, lower processing capacity, and face difficulties moving on terrain covered by regolith, the fine and dusty soil of the Moon. Therefore, the transformable solution was relevant: the robot combined a compact format for transport with a configuration more suitable for locomotion after landing.
Another point highlighted by the researchers was the need to improve telemetry, communication between vehicles, and software flexibility in future versions. In longer missions, robots of this type will need to handle unforeseen events without relying on constant instructions from Earth.
Japan uses SLIM to show a new phase of lunar exploration
The SLIM mission was not important just because of the SORA-Q. According to JAXA, the proposal was to change the logic from “landing where possible” to “landing where desired”, an essential advancement for missions that need to reach scientific points of interest with precision.
After landing, SLIM was turned off due to the unfavorable position of the solar panels but resumed operation when the lighting changed. In August 2024, JAXA officially ended the module’s activities after losing contact with the spacecraft. Even so, the agency reported that the mission exceeded expectations by surviving three lunar nights, something that was not part of the original plan.
This performance reinforced the relevance of the Japanese project. SLIM tested precise landing, multiband camera observations, and the operation of small robots, while SORA-Q showed that technologies from seemingly distant sectors, such as the toy industry, can find real applications in space exploration.
What the small Japanese rover can represent for the exploration of the Moon and Mars
The SORA-Q experience indicates that future lunar missions can use swarms or sets of small robots to explore areas near landing modules, craters, caves, slopes, and regions where larger vehicles would have difficulty. These robots do not replace large scientific rovers but can function as auxiliary explorers, expanding the mission’s vision and reducing risks.
There is also an economic advantage. Being smaller and lighter, platforms like SORA-Q can be integrated into larger missions without requiring a large cargo volume. This opens up space for different sensors, cameras, and communication systems to be tested in real environments.
The Japanese robot attracted attention precisely for combining visual simplicity with high technical complexity. It looked like a small lunar “transformer,” but its scientific value lay in its autonomy, low weight, locomotion mechanism, and ability to generate useful data in a historic mission.
The case shows that the next stage of space exploration may not rely solely on giant and expensive machines. In some scenarios, small, intelligent, and cooperative robots can make the difference between just landing on another world and truly understanding what happened upon arrival.